I’ve been using JT65-HF-HB9HQX for a little while and have just completed my 200th QSO using my Kenwood TS-2000 and 30m End Fed Longwire with Auto-tuner.
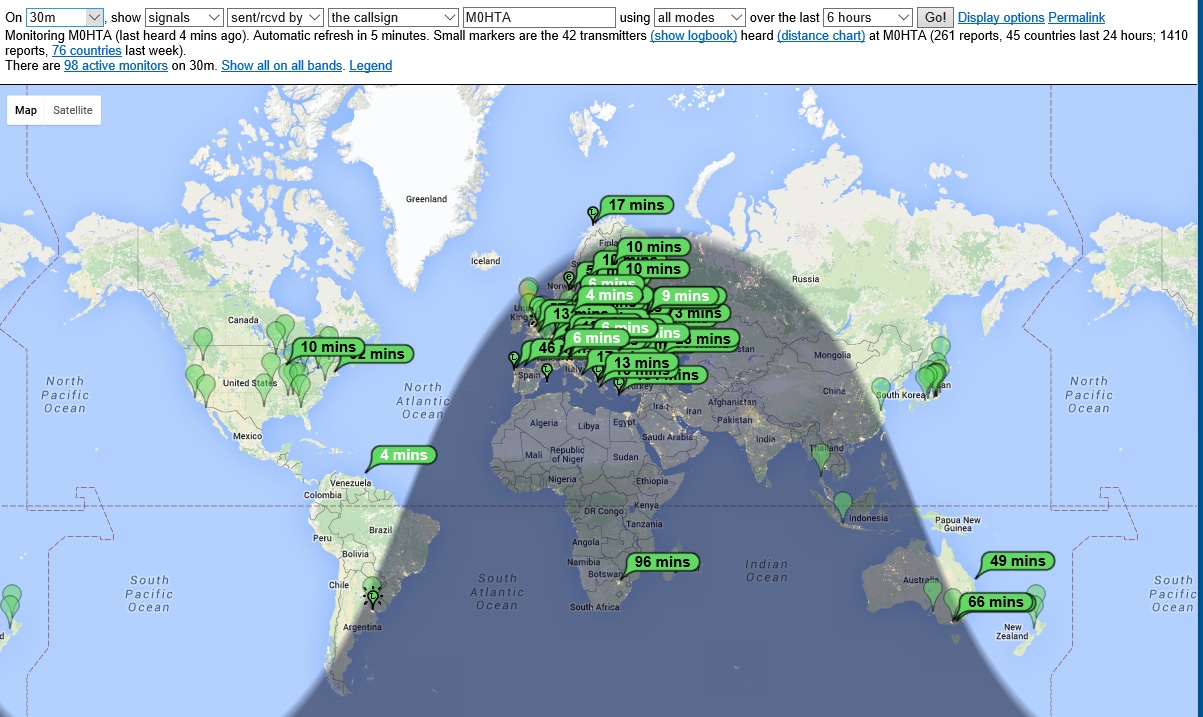
It s quite amazing how far your signal can get!

I’ve been using JT65-HF-HB9HQX for a little while and have just completed my 200th QSO using my Kenwood TS-2000 and 30m End Fed Longwire with Auto-tuner.
It s quite amazing how far your signal can get!
It has taken quite a while and a fair bit of work, but the ham radio mast automation project was finally commissioned and tested today.
The links to the previous parts are here –
The main bulk of the final part was the drawing out of cables from my 40mm duct and replacing the aluminium tube from the rotator with a slightly longer one, this will give me more room for antennas should they be needed at a later date.
So that I don’t have to run more antenna cables from the mast to the shack, I have fitted an Ameritron RCS-8V mast head 5 input antenna relay linked back to the shack by a multicore cable.

Mast winched down to allow the longer pole and relay unit to be fitted, while the mast was down, I added some more ‘P’ clips the tidy the convoluted tube.
The ‘kick’ in the tube allows the mast to sit in the top bracket recess without snagging any cables.

The cables from the mast were put inside an protective sleeving up to the point where they enter the duct, the cables from the mast are:
From the external control, a 12 core multicore cable is also drawn in the duct.

The 12 core is wired into the shack mast control unit, the unit is currently showing that the mast is in the raised position, a cable from this unit goes to the weather station Hobby Board relay interface.
The supply for the Hobby Board interface is derived from the 24v supply which is used for the mast sensors (within the interface is a voltage reduction circuit so it operates at 13v).
The Weather Display Hobby Board program has bee set to output a ‘mast lower’ signal if any of these conditions are met:
The lightning count was originally 8 strikes per minute and as the detector was picking up lightning approximately 30 miles away it triggered the mast to lower, which it did. As their is no distance calibration, I have increased the strikes per minute as I’m assuming the strike rate will increase as the storm gets closer.
If you have any questions or comments, please feel free to get in touch.
January 17 Update
Without my weather PC running Lightning Data could not be used, in Jan 17 I turned off the PC so now the weather related mast condition is from a standalone wind speed device.
Please see Part 5 HERE.
Third installment of the thrilling journey to install automation control to raise and lower my 12m radio mast, Part 2 is HERE.
As it was such a lovely few days weather I thought I’d spend some time working on mast automation, the proximity sensors (link to sensor blog) have been installed previously, so it was time to wire them up.
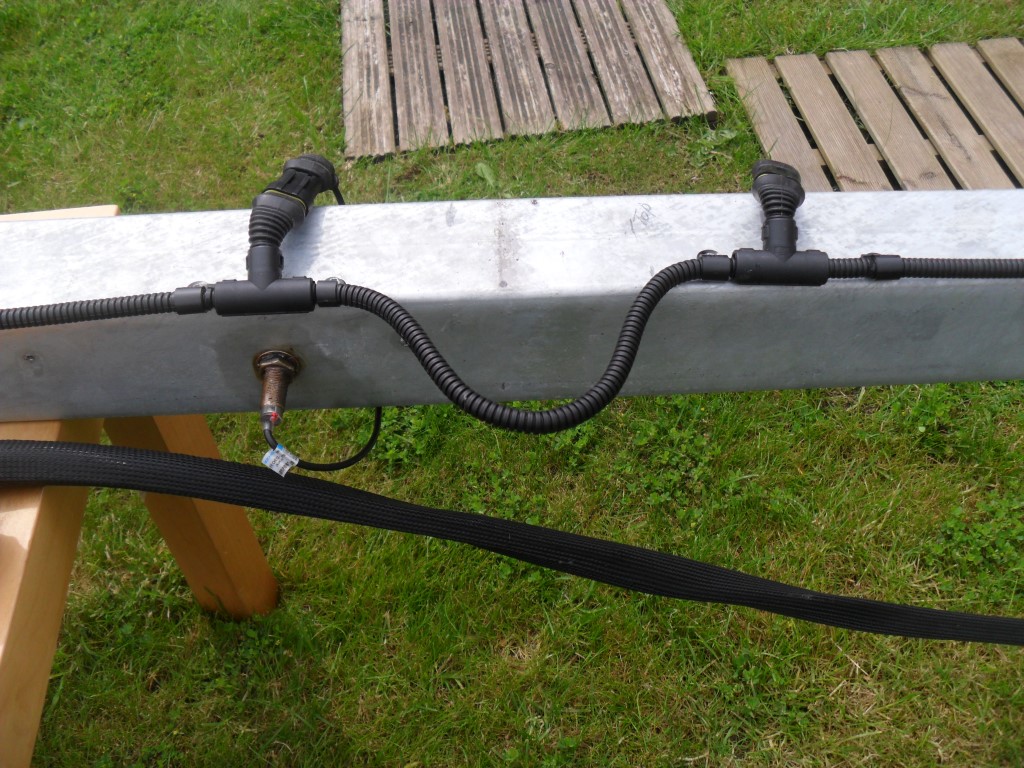
I bought some 10mm convoluted tube and ‘Tee’ fittings from Hilltop Products, 3/8″ P clips came courtesy of eBay, the existing mast control wiring arrangement was completely removed and replaced with new tube and clips, an 8 core cable (Alarm cable 7/0.2mm) was drawn in, each of the four mast sensors had a unique signal cable, the other four cores were doubled up for 24v power to the sensors.
The ‘Tee’ pieces were ideal to close on the Superseal connector rubber boots and gives a great finish.

I fitted an Emergency Stop button to the side of the mast and added a longer length of cable to the solar panel via a Superseal connector, existing control relays in the battery box were also removed and enclosure holes sealed.

It was at the point of cleaning up the battery box that I measured the current draw taken by the high current relay when energized, I had factored about 1A, however it turned out to be 2.5A, this meant that my controllers wiring loom switching wires were underrated.
I had neatly lace wired with waxed cord my loom, and it took me ages to undo that good work and replace the switching wires with 0.75mm2 singles, one this was done, it was out with the waxed cord for round two.
The reason so much effort was taken with cable identification and looming was that all the kit had to be striped from the wooden backboard in order for the board to fit back in the enclosure, once in, the kit gets remounted, it’s not a big space to work so I knew I had to make it robust against wires coming out.

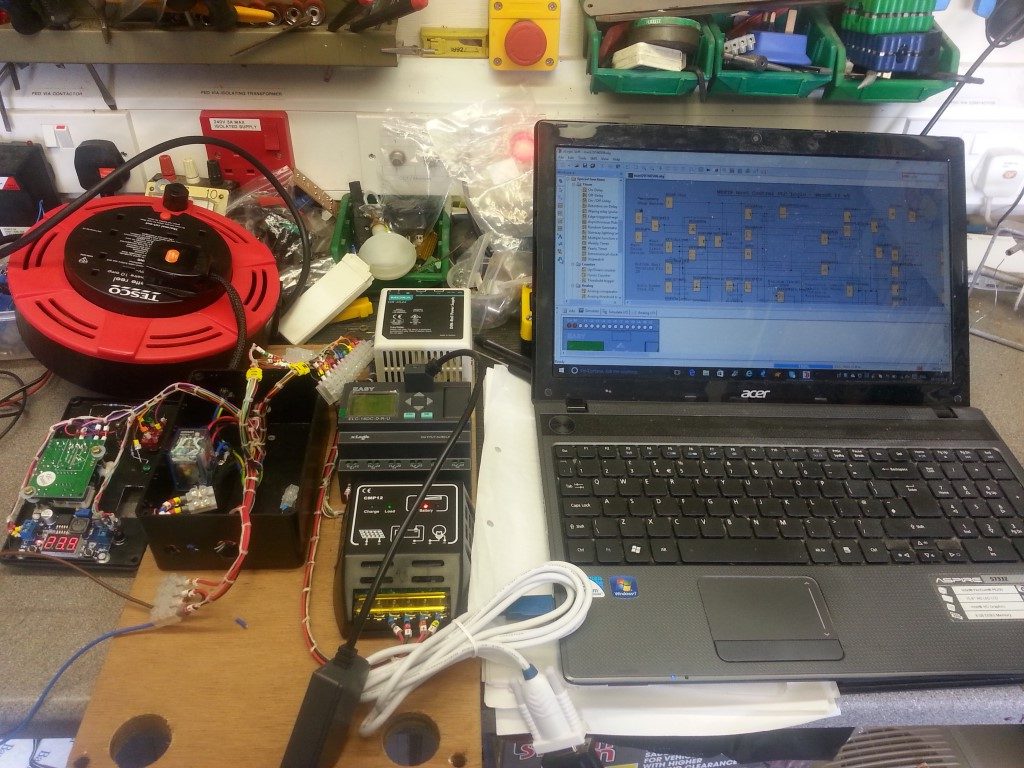
Once installed and powered up, I tested the speed of operation of the emergency stop button, fortunately its as near as instant as I could perceive, so I pressed and released the mast raise switch, and stood back with my hand on the E-Stop in case it overshot the limits and the run timer was set too long, as it was it work perfectly, as did the lowering operation, the picture was taken after I pressed the Battery Charge override button, this disconnects the battery from the solar panel charger as the 4A charge is ON, battery voltage is displayed on the Mast Controller box and when this reaches 14.14v, the PLC will turn the charging relay off, reconnecting the battery to the solar charger once more.
Every four lifts of the mast or every Sunday at 01:00 whichever is sooner will cause the charging sequence to begin, in case the battery is unable to reach the set-point voltage, the PLC will disconnect the charger after 10 hours of use.
The white pipe at the bottom of the enclosure is for a single 12 core to the remote control unit in the shack, this is the next job to wire.
Power to the motor is from a 45Ah 360A battery, the original 063 type from Halfords was beginning to signs of aging, so I bought the one below from eBay for £24:50 in January 17:

The battery is maintained by a solar panel and after 4 lifts, a 4A charger kicks in, solar panel charging currrent is 502mA: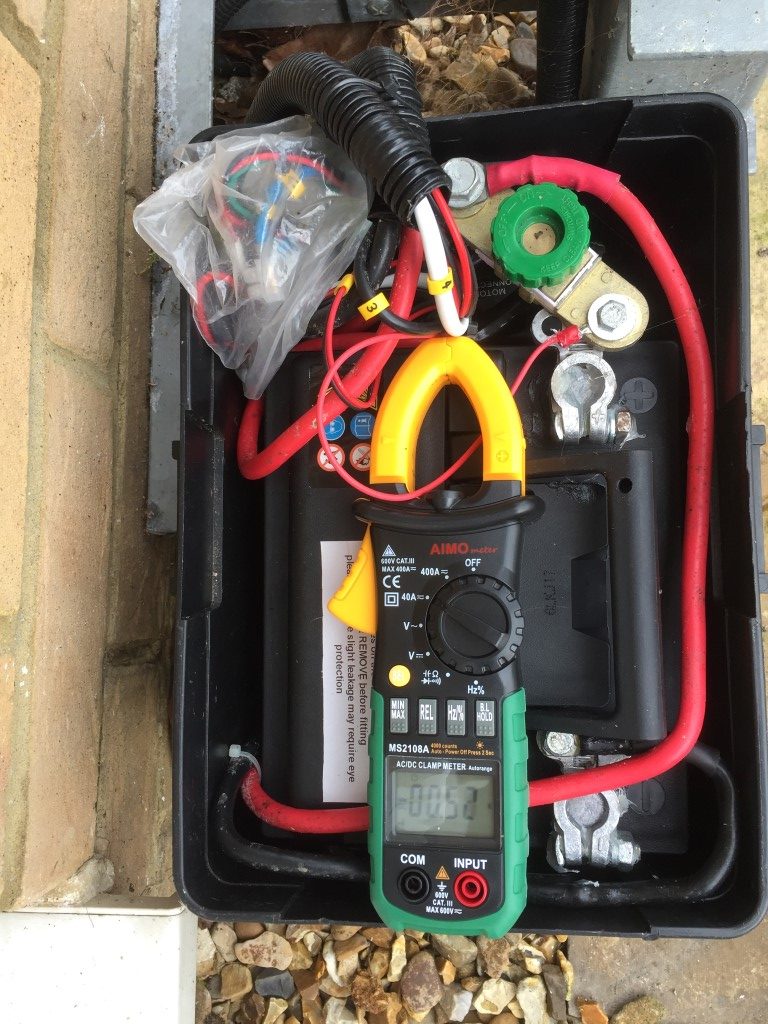
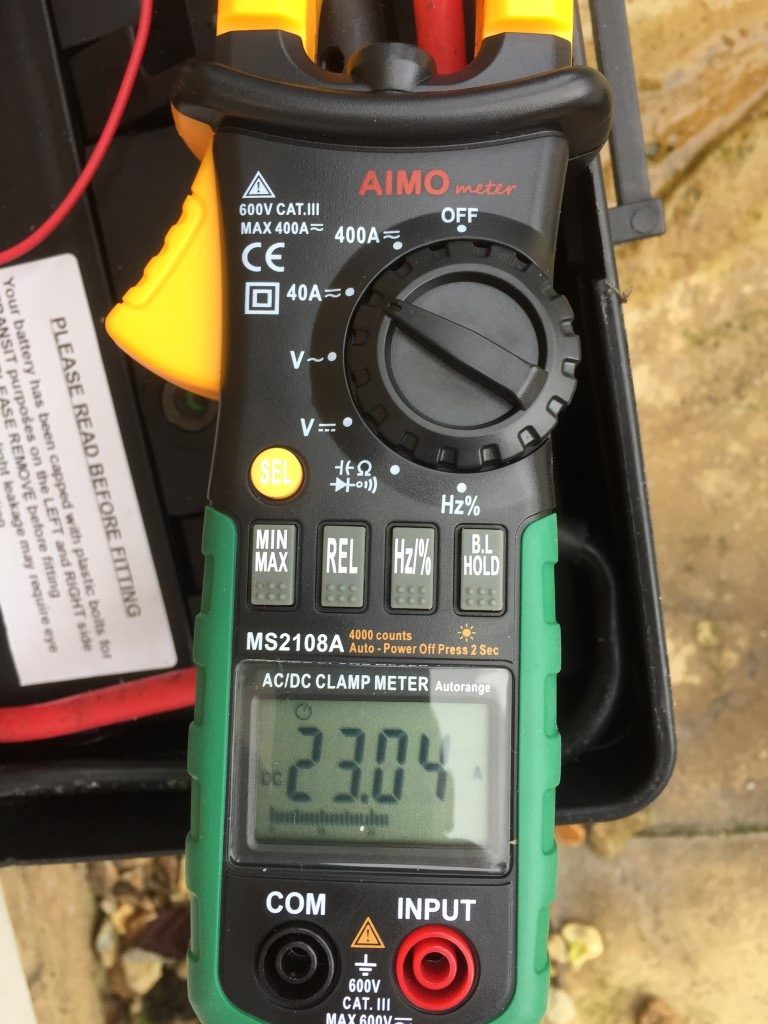
Current drawn by the motor raising the mast is a little over 23A, the duration is approximatly 47 seconds for the mast to reach full height.
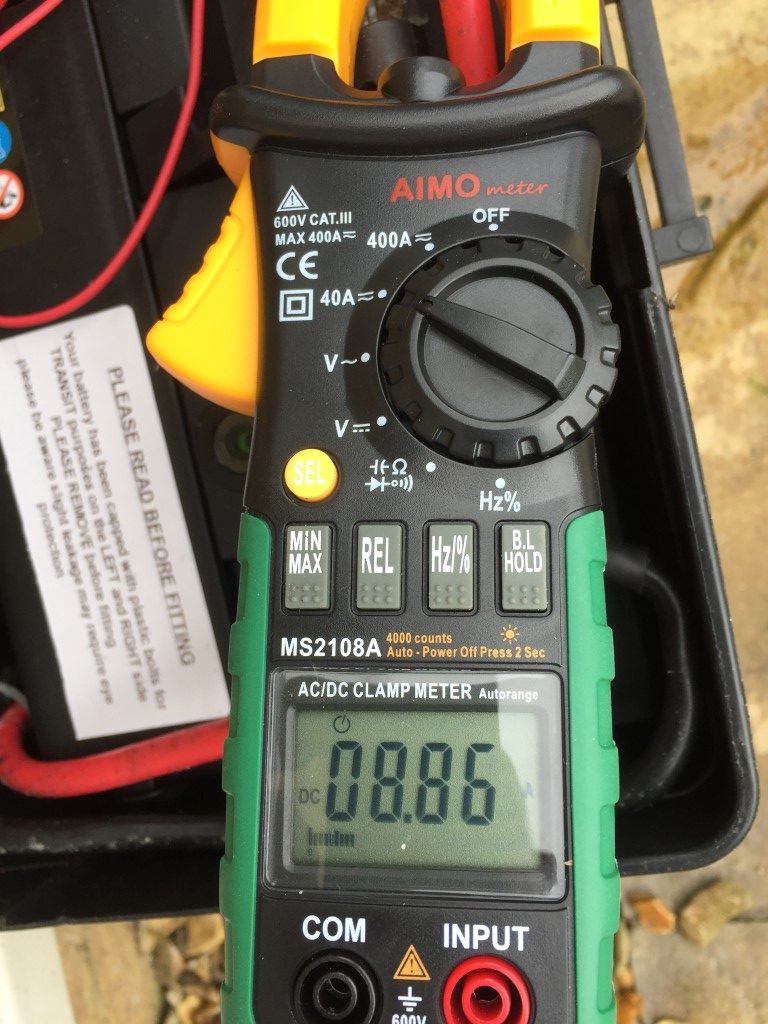
The Load and time taken to lower the mast is a lot lower at 8.86A.
Please see Part 4 HERE.
Continuing on with the radio mast automation, this blog shows how I have wired the controller. (Part 1 is HERE)
The external enclosure for the automation equipment has a plywood back board which is removable, it is to this I have mounted all the necessary bits of kit, I have loomed all the cables in with waxed lacing cord and given each conductor a unique ident for ease of fault finding.
To allow the back board to fit back into the enclosure I will have to strip everything of the board first, the 24v DC transformer and PLC are mounted on ‘top hat’ rail for ease of removal, the solar charge limiter and main control unit are held in place with wood screws.
The PLC controller is powered using 24v DC, I did try it on 12v but the output relays seemed sluggish when activated, the proximity sensors I’m using have a wide operating voltage range (9v – 30v) so these will be fed at 24v, due to the wide voltage tolerance, voltage drop will not be an issue considering the maximum cable run is 7 metres, (I’m using 8 core 7/0.2mm CSA).
The input to the PLC will be a switched high of 24v with the exception of the battery fully charged input (the board for this is affixed to the lid of the enclosure), when a charging voltage of 14.14v is reached, this will switch the battery voltage to the PLC input via a relay to cancel mains powered battery charging (link to blog on voltage relay HERE).
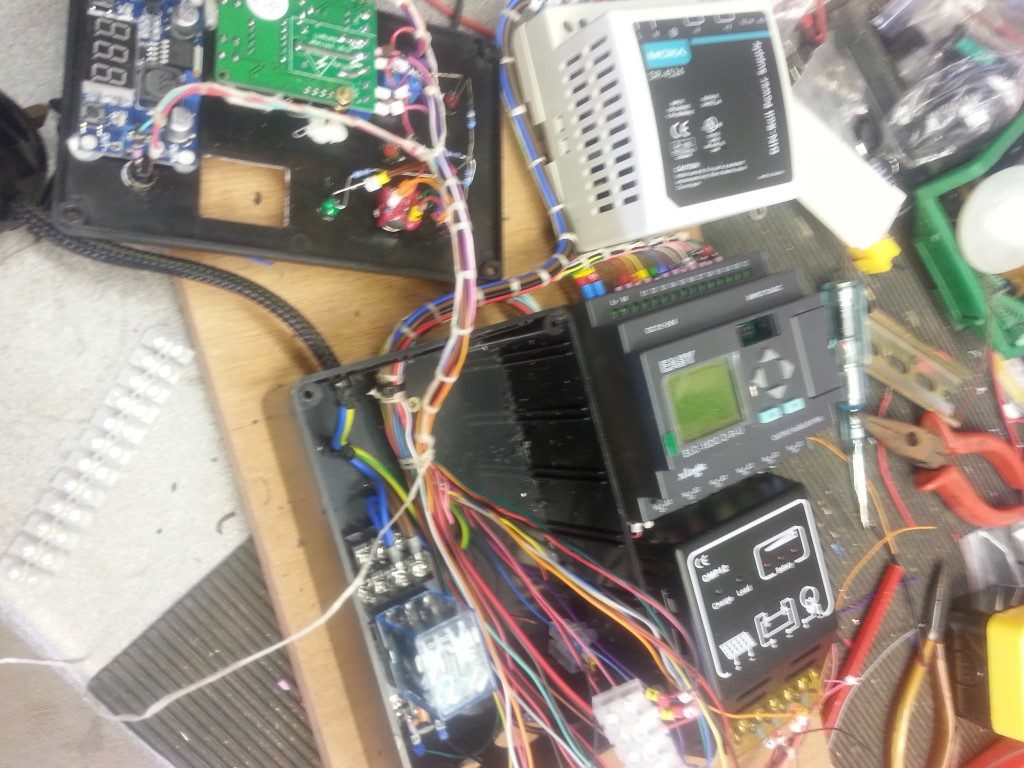
All cables have been marked up to aid fault finding or making additions to the control system should I need it, the image shows cables marked and ready for looming.
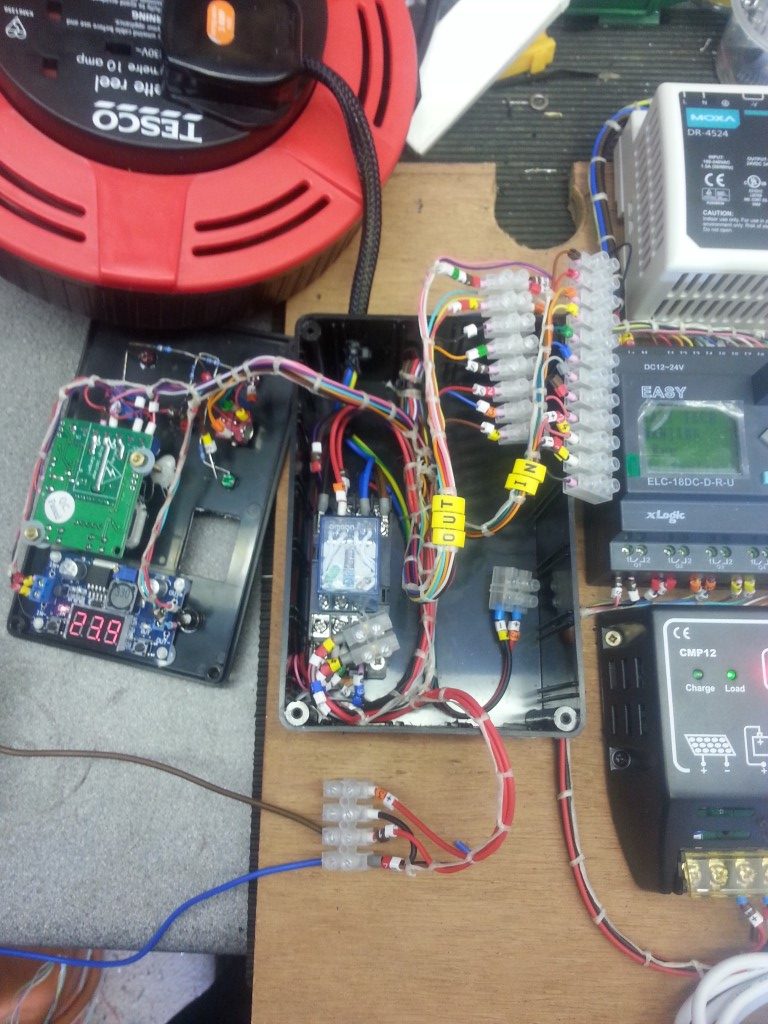
Cables loomed up with waxed lacing cord and powered up ready for bench testing.
Slight tweak to the PLC program to invert the Hall Effect limit switches, for testing purposes the run on timers were set at 5 seconds, after timing the raising and lowering of the mast with a fully charged battery, the correct timings have now been uploaded.

Phew!, the lid fits on the controller 🙂 and everything seems to work!
30 May 16 – I decided to use the enclosure which houses my Easy Rotor Control as the place to fit the indicators and remote switches to control the mast from the shack as it had plenty of room.

From Left to Right – The main On/Off switch is the first switch, in the ON position a small LED to the left of the switch will be lit, turning the switch OFF acts an Emergency Stop to the PLC
The Green LED is for mast fully lowered, the Amber LED is lit when an output from the weather station is active (next picture) and the Red LED is for mast fully raised, the switch on the right is momentary operation, non latching center off and is used to send a positive input to the PLC to either lift or lower the mast if the correct logic is satisfied.
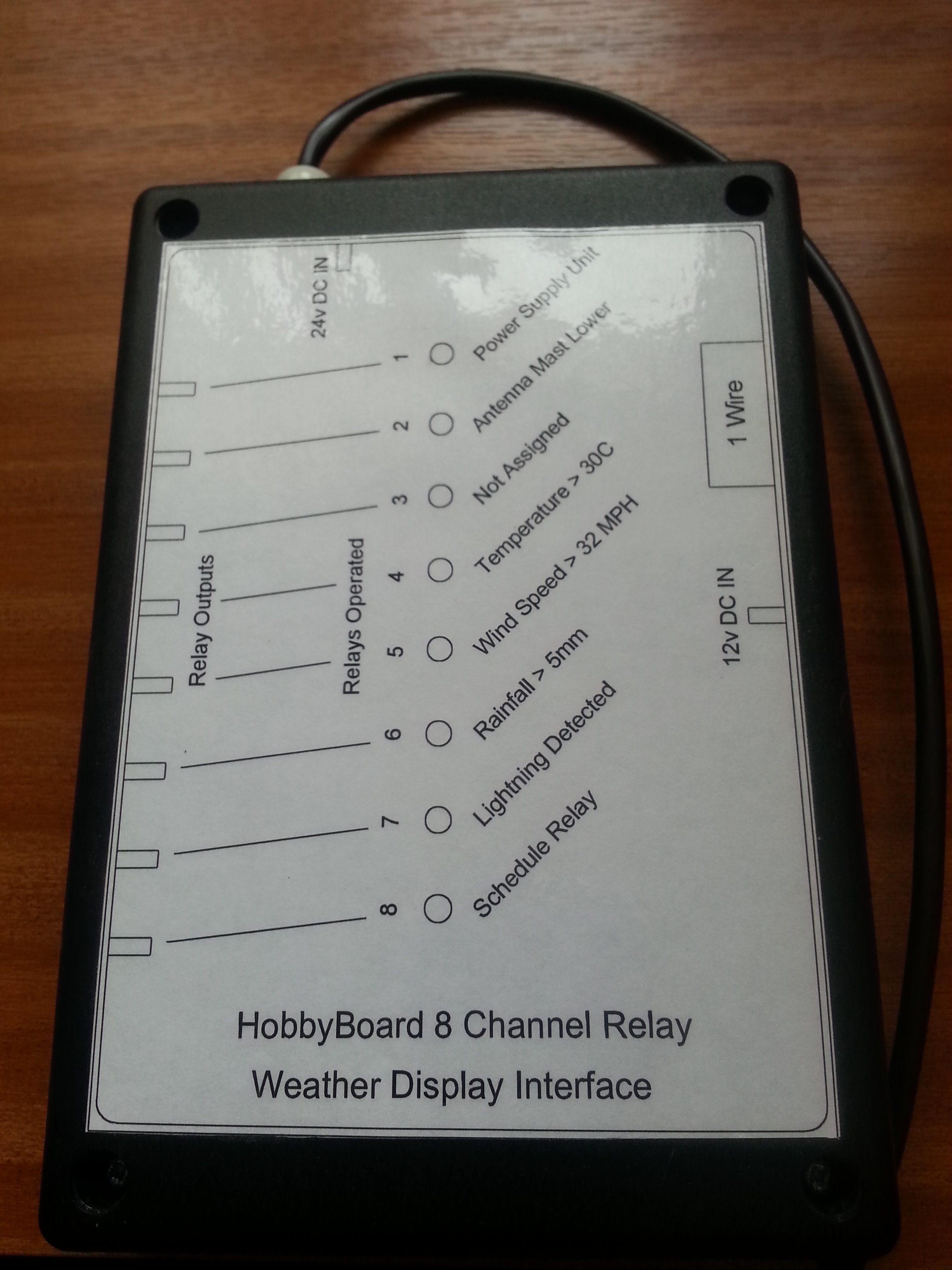
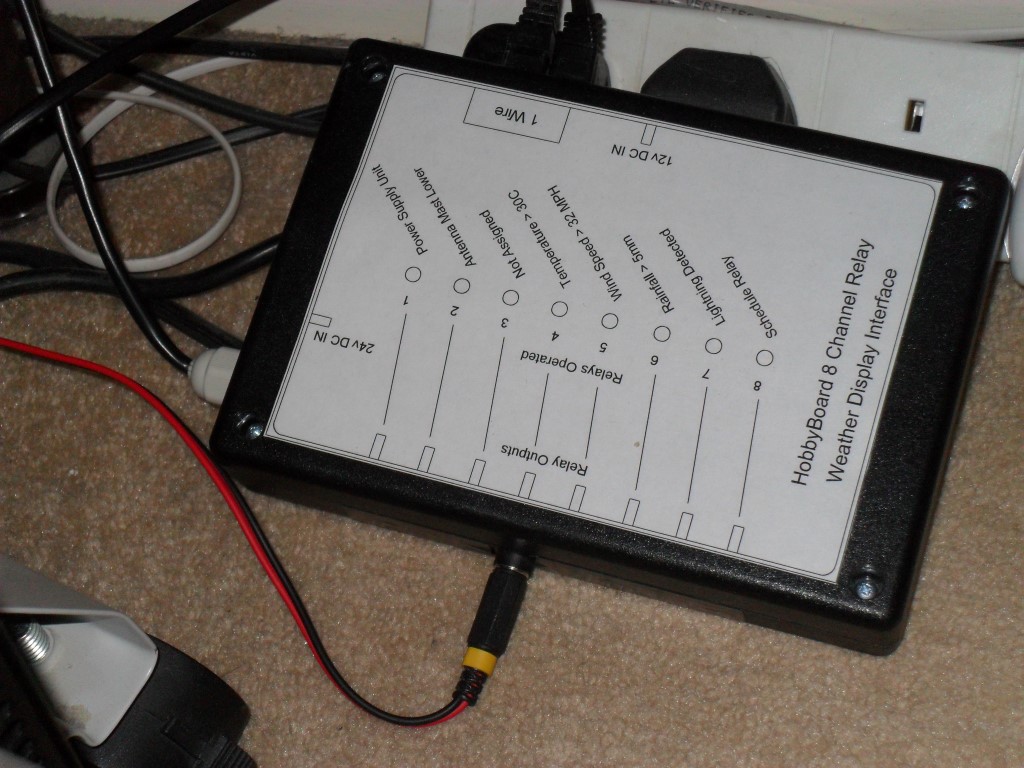
The weather station interface is a HobbyBoard 8 channel relay unit (unfortunately these are no longer available from HobbyBoard), this is linked to Weather Display software to control the output relays when certain pre-configured thresholds are met.
I have wired the internal relays in parallel so if any relay operates it will send a positive voltage to the PLC weather input (WX) which in turn will lower the mast if raised.
I have set the mast to lower should the wind speed exceed 30MPH and if 8 strikes of lightning within 1 minute are detected, these values may well change in future as experience grows.
The next stage is to mount the external enclosure on the wall and strip down the existing control circuit and replace it with the PLC control, this will mean adding new cables to the mast to pick up the additional proximity sensors and a multicore cable to the shack to the control box, the wireless handsets I currently use will then only be used as I’m luffing the mast.
Please see Part 3 HERE.
I bought a Ameritron RCS-8V 5 way antenna switcher from Ham Radio Outlet, this uses a rotary switch in the shack to select a remote relay to energize, this allows up to 5 antennas to use a single coax.

I use Ham Radio Deluxe as my program of choice, this software has a feature to allow automated switched depending on the Band in use via the computers Parallel Port (Auxiliary Switching).
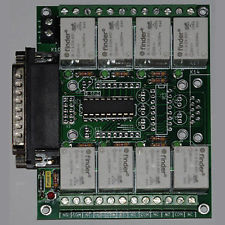
I bought an 8 relay interface off eBay for £18 and mounted it inside an enclosure, the Parallel lead from the PC to the interface was also from eBay and cost £2.

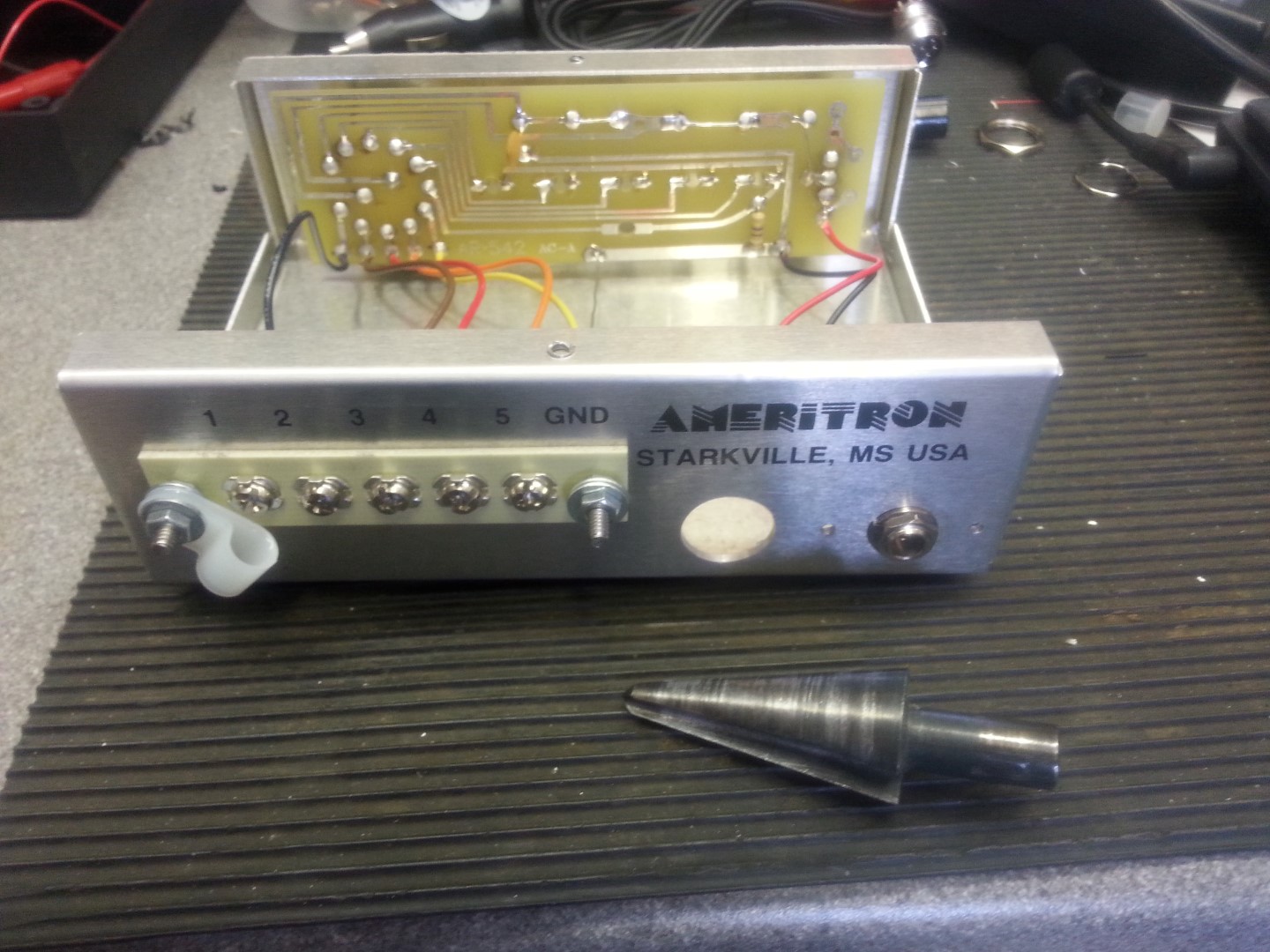
The inside of the RCS-8V is a simple two pole rotary switch, one pole switches 12v to the panel LED, the other pole switches 12v to the output connections for the relay.

The above picture is of the opened external relay unit, the first thing I noticed was that the relay armature had jumped out of position in transit and was on the wrong side of the contact, this fortunately was easily sorted.
The On/Off switch on the RCS-8V is a single pole double throw, I decided that for normal operation, when the RCS-8V was in the ON position, control was only via the rotary switch, with the switch in the OFF position, control of the RCS-8V will be from the relay interface, power for the interface will also be switched from the RCS-8V.
The connection from the interface to the RCS-8V is via an 8 pin connector which needs a16mm hole.
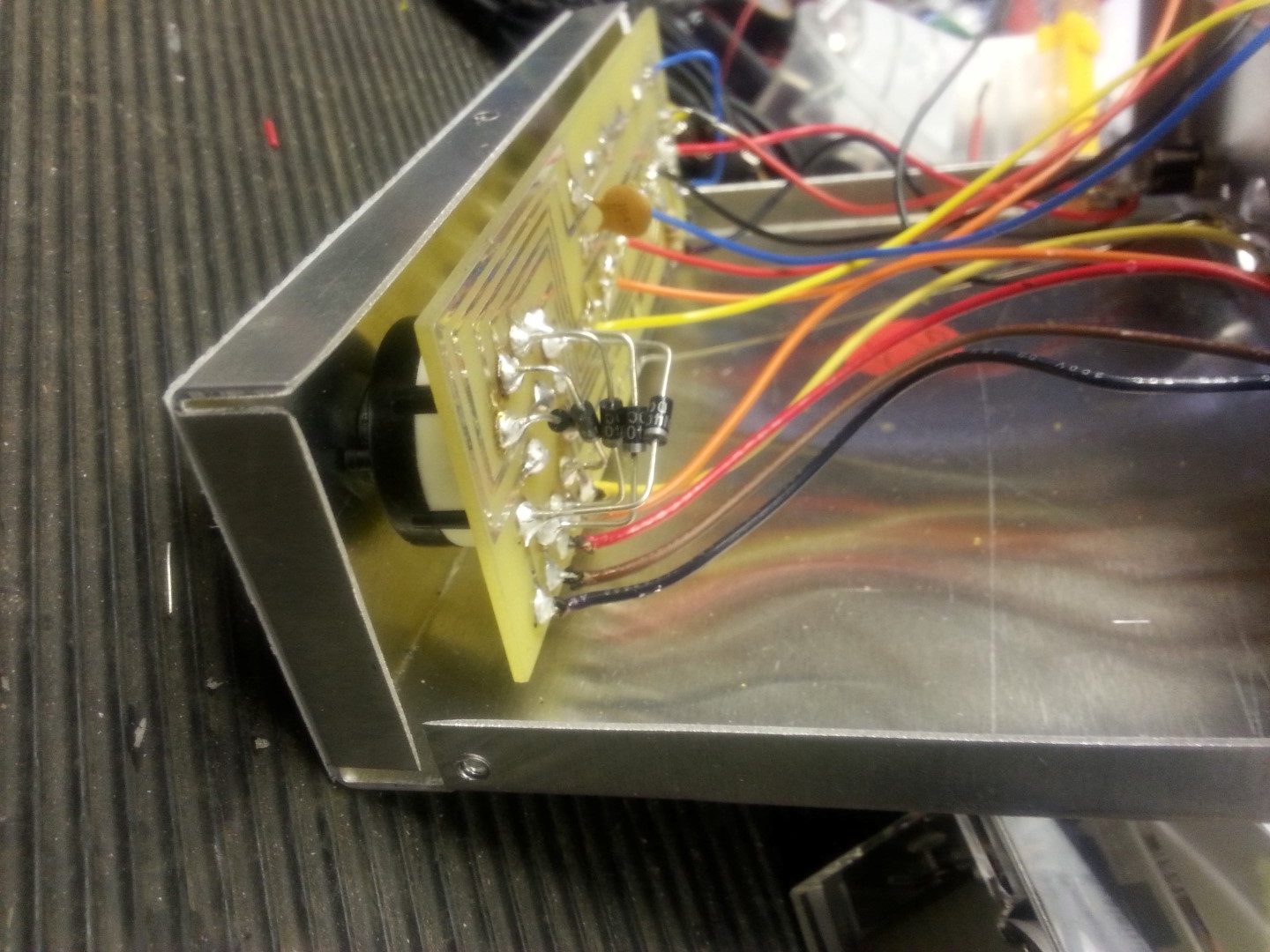
Diodes were soldered across the rear of the rotary switch, this allows independence of switching, so if the rotary switch is left on antenna relay 3 for example, when the front RCS-8V switch is set to OFF, power is applied to the interface and whatever relay switches becomes the master (example below).

RCS-8V switched ON, no power to relay interface, rotary switch selected antenna 3.

RCS-8V switched OFF, power to relay interface ON, relay 4 switches antenna 4.
Cambeam 2016 the Cambridge & District amateur Radio Club newsletter has a great article on using an Arduino for automating antenna relay controls and is worth checking out. Article by Bob Cowdery G3UKB.
Had a play with my Mag Loop project, the problem I had was that the stepper motor which turned the Vacuum Capacitor introduced a lot of noise into reception, removing the supply from the stepper motor caused the bellows in the capacitor to return to a resting position, knocking the tuning out.
To combat this I have fitted a friction brake which uses a terry clip to the shaft of the motor, this seems to work ok, but a bit more work needs to be done.

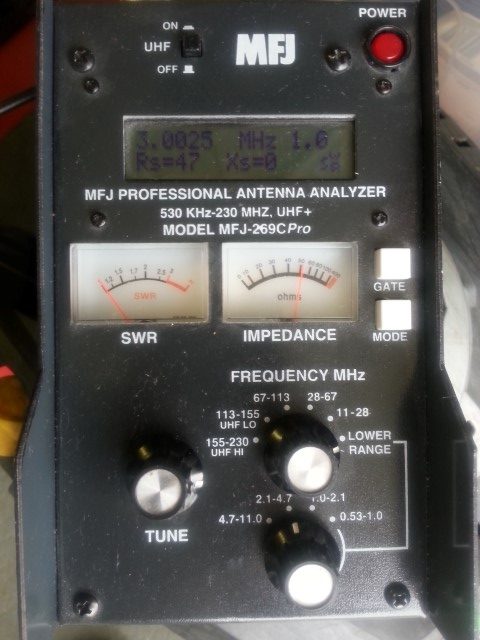
The loop tuned perfectly on 3Mhz, pity it’s out of band, oh well, a job for another day!

Updated 8 June 2023
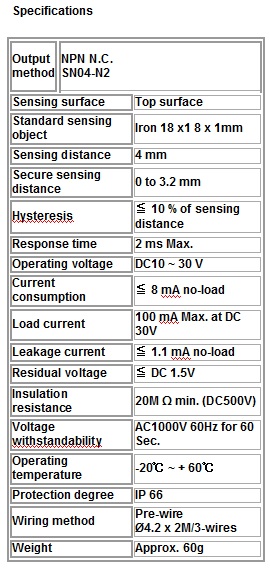
This Blog post went into detail on the sensors used for the mast position, I have found reasonably priced ferrous metal inductive proximity switched, these are non contact devices with a detection range of 5mm which is perfect for my application of securing pin detection, feeding into the masts PLC logic controller.

Sensor mounted below bottom mast securing pin hole, the sensor was fixed the mast by drilling and tapping a 6BA hole, the HSS drill size of 2.3mm for a 6BA tap cost 99p for 10 from Hong Kong, the machine screws which come with the sensor appear to be imperial and were discarded.

Test position for alignment and operation checking.

Lower pin sensor finished with a three pin male Superseal waterproof connection, the female will break out of the 10mm convoluted conduit via a hinged tee piece.

Top mast securing pin sensor being fitted, this pin stops the mast from tilting down (Luffing), the output from this sensor, like the bottom pin detector will influence the functions available in the PLC controller, for example, if the mast is elevated and the top pin is removed, the mast will not lower as this is an unsafe condition.
The next stage is the mounting of the controller cabinet and wiring which can be found HERE.
Update 20 July 17 – Top proximity failed and had to be replaced, no sign of water ingress and the potting and cable entry look in good order, so not sure what the cause of the failure.
Extrernal Link to Inductive Proximity Sensor Technology blog.
This blog is an update of this – Pan & Tilt Orbitron Interface post as I’ve added some pictures of the kit used and I have finally got round to putting the Rotorcards in a decent enclosure.
The main controller is a ERC-M USB kit which interfaces with the PC and programs which are running , the Rotorcard relays are controlled by the ERC-M, the Rotorcard also provides a positional feedback to the ERC-M.

Front panel of the Desktop housing for the ERC-M, the front panel has manual buttons for up/down tilt & left/right pan, LED’s also show when a signal is sent to the Rotorcard relays.
The two yellow LEDs on the left hand side indicate the signal to the auxiliary relay.
The LCD display is showing the position in degrees, the number after Az or El is the feedback from the Pan & Tilt head, the numbers on the other side of the > are the output from the software, the ERC-M compares the two values and energises the appropriate relays which in turn operate the motors in order to keep the values aligned.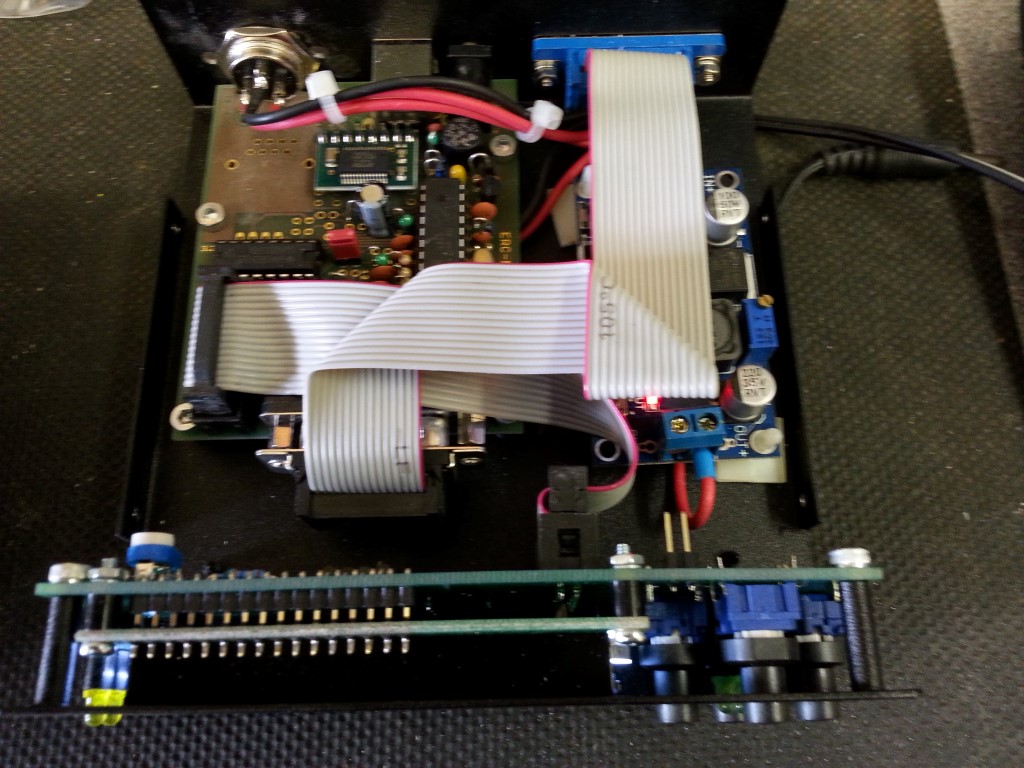
The ERC-M kit is the top left PCB, the desktop housing is also a kit comprising of the LCD display and front panel buttons.
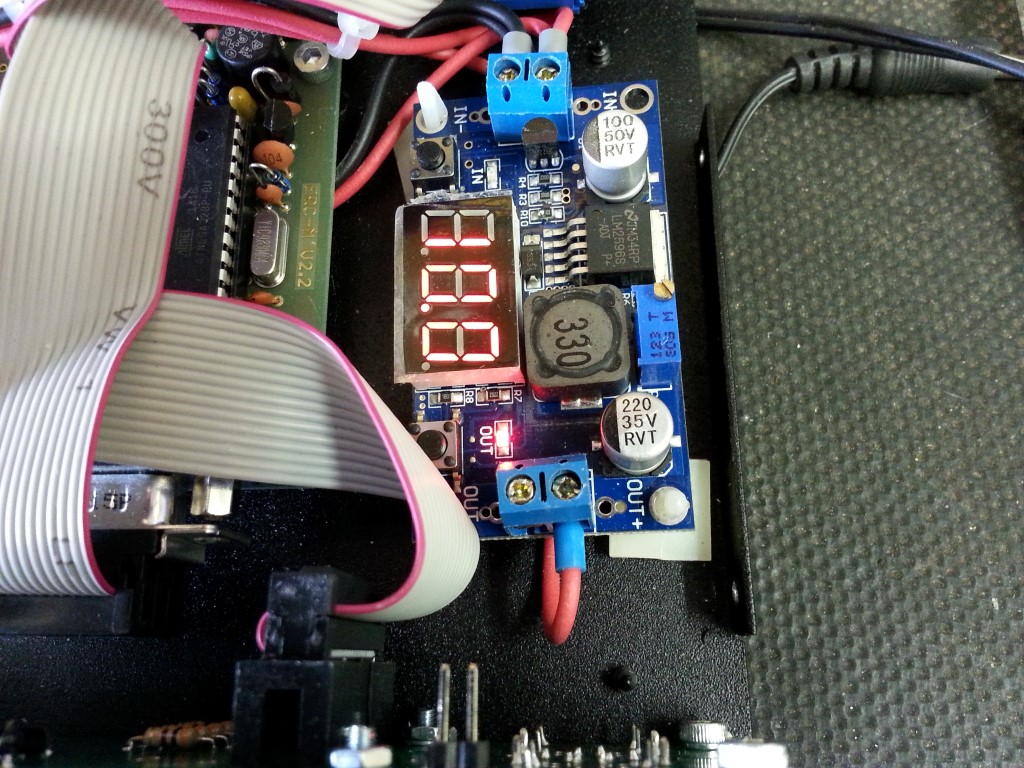
The PCB mounted inside the desktop housing is the 13.8v to 10v voltage regulator which provides a stabilized supply to the Pan & Tilt heads positional potentiometers.
An external 13.8v supply is required in order to drive the high current motors of the Pan & Tilt head.
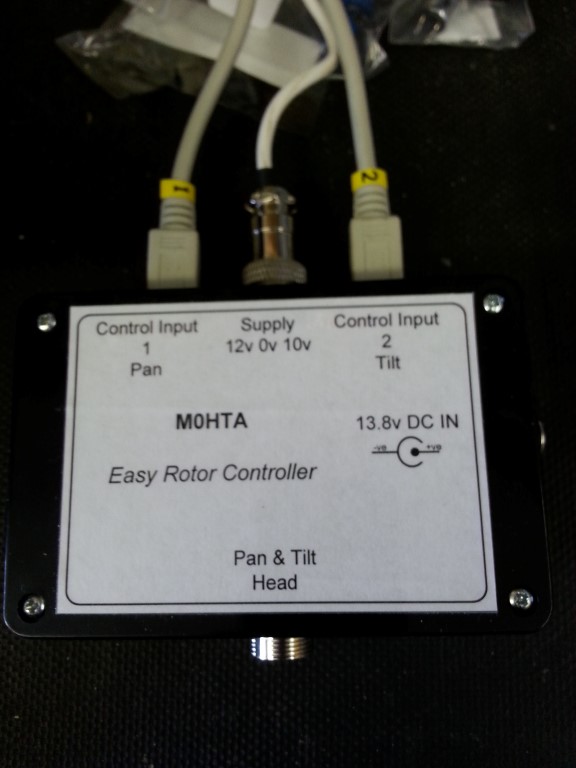
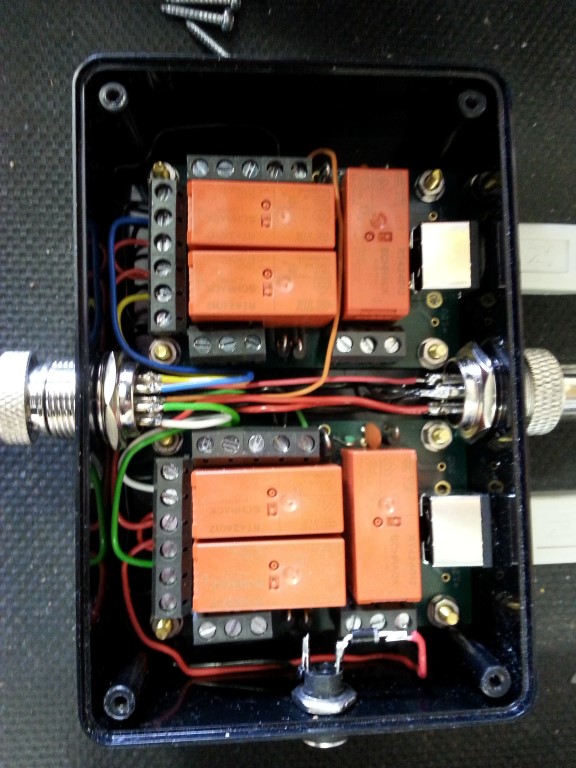
The two Rotorcards (one for Pan the other Tilt, or more correctly Azimuth and Elevation respectively) are enclosed, 13.8v can be fed to the relays here or at the desktop housing.
 The three outputs from the ERC-M enter on the right hand side to the Rotorcards, the middle connector is the 13.8v – 0v – 10v supply.
The three outputs from the ERC-M enter on the right hand side to the Rotorcards, the middle connector is the 13.8v – 0v – 10v supply.
The top Rotorcard relays operate for clockwise or anticlockwise supply to the Azimuth motor, the third relay is not used (auxiliary relay) as the Pan & Tilt head does not have an electro-mechanical brake fitted, if it did, relay three would operate in advance of the motor supply relays.
The bottom Rotorcard is for elevation, Up & Down.
On my version, the ERC-M is connected to a PC via a USB connection to Com Port 6, the position of the heads has already been calibrated using the provided software from Easy Rotor Control.
To start tracking satellites, the first step is to open Orbitron.
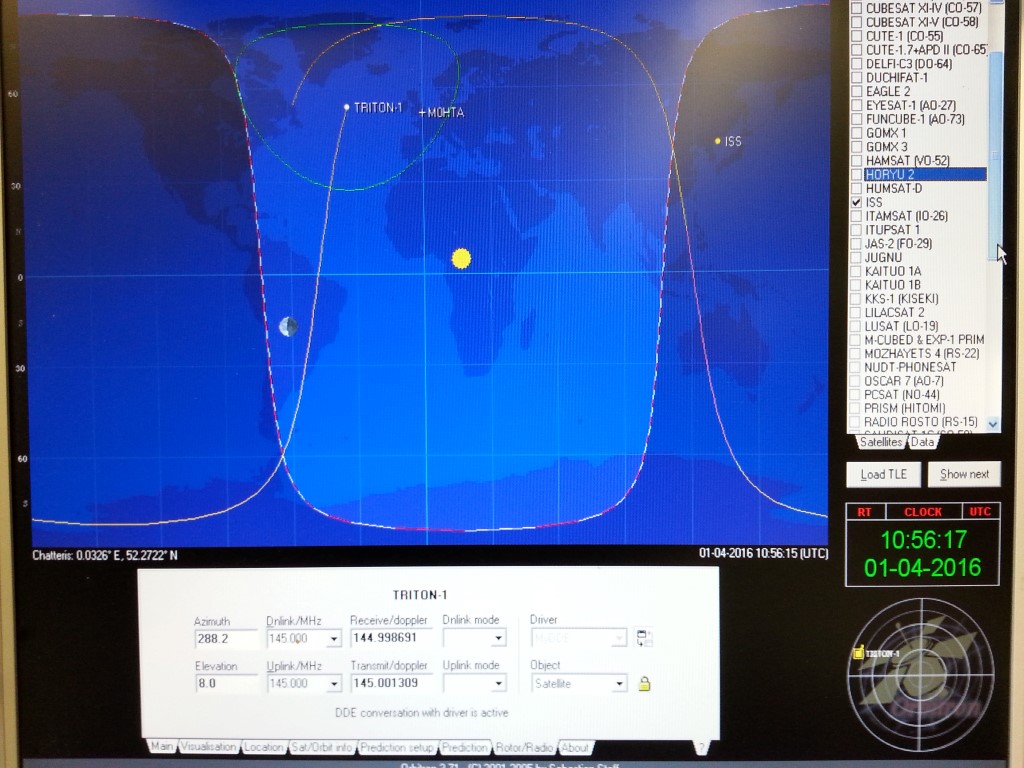
This is a free download program, each time it is ran, check that the TLE files have been updated then select the satellite of interest from the right hand list, once this is done, click on the satellites on screen icon.
On the bottom tabs, select rotator and click DDE a small box should now open on the screen with live positional data of the selected satellite showing, (a separate download is needed for the DDE function).
Open PST Rotator program:
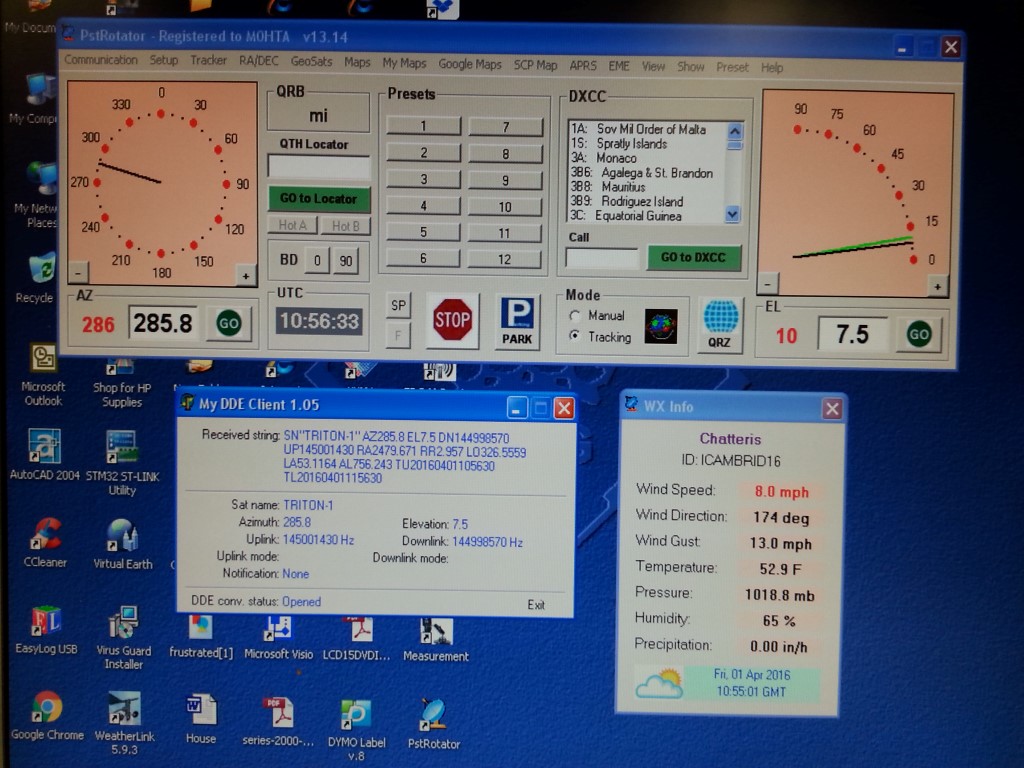
Using the PST Rotator settings configure the program to respond to Comm Port 6, use Orbitron as the controlling program, that the type of head ouput is GS-232 and Az/El is selected.
When the program is set to ‘Track’ as the above image, the displays show the actual position of the Pan & Tilt head by a black line with the green line showing where the head needs to move to, the green line is controlled via DDE from Orbitron.
A further setting I have enable is the link to weather information, this allows the mast to rotate into the wind when a trigger speed has been reached, this reduces wind loading on the mast and antenna.
 This is a Dennard CCTV Pan & Tilt head and operates at 24v, 13.8v works it just fine with a maximum current draw of 600mA, I have commoned the potetiometers supply, so the minimum number or wire cores is 8:
This is a Dennard CCTV Pan & Tilt head and operates at 24v, 13.8v works it just fine with a maximum current draw of 600mA, I have commoned the potetiometers supply, so the minimum number or wire cores is 8:
2 – Pan Motor
2 – Tilt Motor
2 – 10v supply across positional potentiometers
1 – Signal feedback from Pan
1 – Signal feedback from Tilt
The next stage is to get some decent antennas for satellite reception.
My local area has quite an active 4m band, and recently Andy (G6OHM) has gained an NoV for a 4m simplex parrot which is working well.
Kevin (2E0OPU) kindly gave me a 4m band dipole as he knew I had an Icom 7100 and no antenna, so I finally got round to installing it.
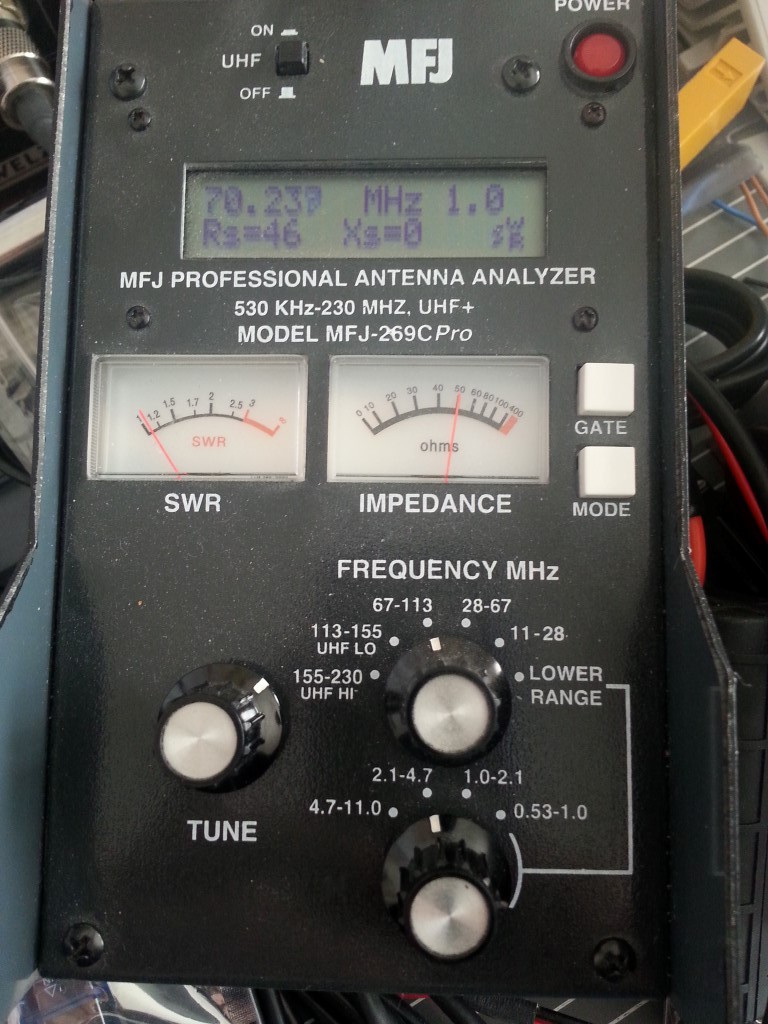
I did a temporary setup at ground level and got the VSWR to 1.0:1, mounting the antenna in it’s fixed location would not allow me to get the VSWR below 1.6:1 (this would give me a reflected power of 5.3%).
The cause of this problem was the close proximity of my mast, extending the dipole 300mm past this structure solved the problem.

The dipole is horizontal for an SSB contest at the moment, I have used a stand off sleeve which the dipoles supporting tube slides into, this allows me to retract the dipole for fine tuning, a self tapping screw is used to hold the dipole either horizontally or vertically.
The bracket for the dipole was their before the mast, hence in the horizontal plane, the dipole it is across the mast stopping it from tilting for maintenance, as I have to get up the ladder to pull the mast top securing pin, it’s no big deal as I will move the dipole out of the way at the same time.
The VSWR is 1.0:1 or as near as damn it!
Note – This is the starting point in my mast automation project, several things ‘evolved’ during the overall project, therfore as you read through this and get to the end of the Parts, you can see the changes, tweaks and additions which have improved the project.
===================================================
My mast has an winch to raise and lower the inner section of the mast.
This project is to fully automate the process and add a level of intelligence into the mix, my requirements list is:-
I was going to use relays, and made a start on the construction, but the more I thought about interlocking and timers the more unrealistic this option became.

The relay unit currently in use which works fine is shown below, two of the relays are for the raise and lower switches, the other two are for overrides.

My plan is to use a Programmable Logic Controller (PLC) which needed to have 12 inputs and 4 relay outputs.
I found a company on the internet called Audon.co.uk, the model chosen was ELC-18DCD-R-U at £69 ex VAT and I also bought a RS232 programming lead for just under £20 ex VAT, the PLC has a voltage range from 12 to 24v DC is very compact and will do everything I need and more.
A major plus was the programming software is free and very easy to use.

Link to PLC Software Link
Link to PLC Manual
The drawing shows the sensor positions, currently the mast only has up and down limit switches fitted, the upper and lower securing pin detection will be fitted when the parts arrive from the other side of the world.
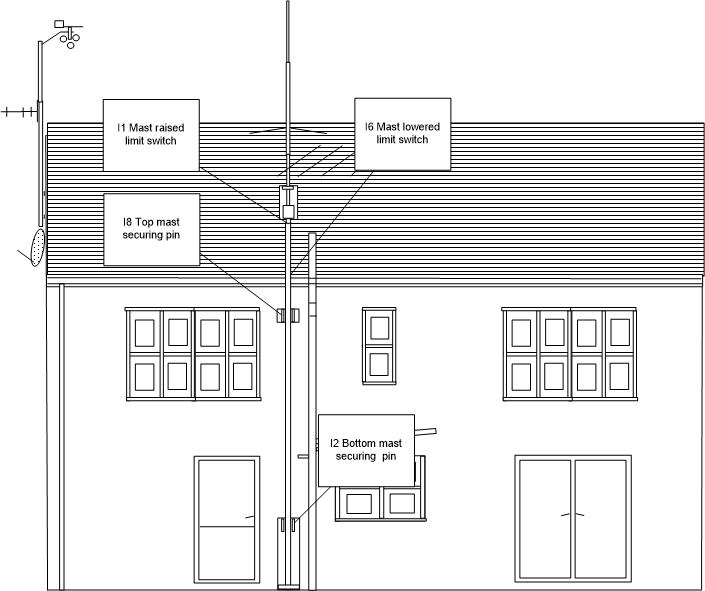
The way of working will be:
Normal Up & Down
Momentary pressing of the down button on the remote hand held winch unit, will fully lower the mast, pressing the up button will do the reverse.
Luffing the Mast
Luffing (Tilting down) of the mast for maintenance will involve setting the PLC input switch to Luff, this will only lower the mast if the mast is lowered, the lower securing pin is in and the upper securing pin is out.
The logic plan shown below has been imported from the software program into Visio and I’ve added some idents to make it easier for me to fault find at a later date.
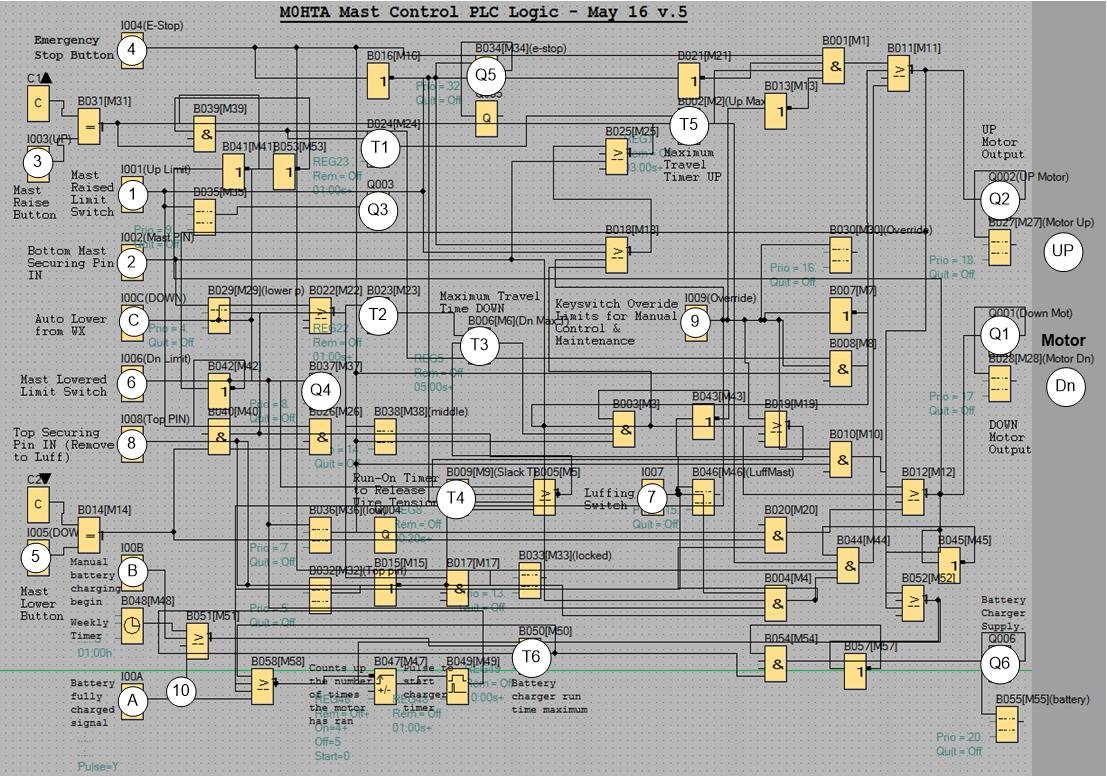
Descriptors for the idents is below.
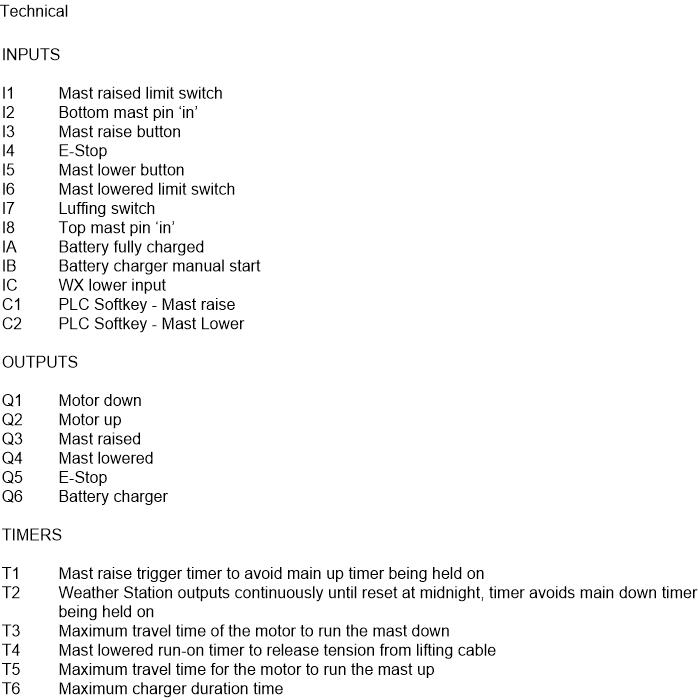
The next stage of the project is to mount the PLC in an enclosure and fit the securing pin sensors, please see Part 2 HERE.