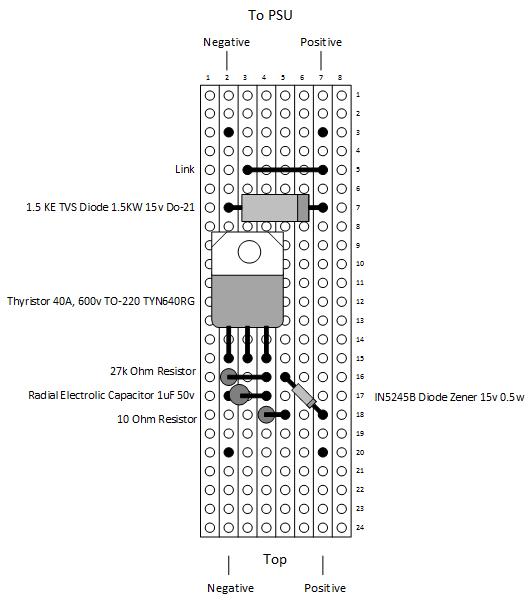
NOTE – Thanks to Stewart (G0LGS), no consideration was given to the current carrying capacity of the veroboard tracks, which turns out to be just under 6A, so, if you are going to make this, please bear that in mind.
I was looking for a simple circuit to protect my radio and auxiliary equipment from overvoltage and found a circuit diagram and full description amongst other useful projects on Phil Salas – AD5X site – www.ad5x.com/articles.htm.
The voltage protector file including circuit diagram and full parts list is available for downloadable here – Vprotect.
The circuit is designed to ‘blow’ the supply fuse to the equipment in order to protect it, the protection is from reverse polarity as well as transient spikes and damaging overvoltage.
The specification for the Kenwood TS-2000 is 13.8v +/- 15% ( Total Maximum voltage 15.87v), this circuit will only allow 14.8v to pass before the protection crowbar circuit operates.
The components are sizes for 40A, the Kenwood maximum current draw is 20.5A, so well within capacity.
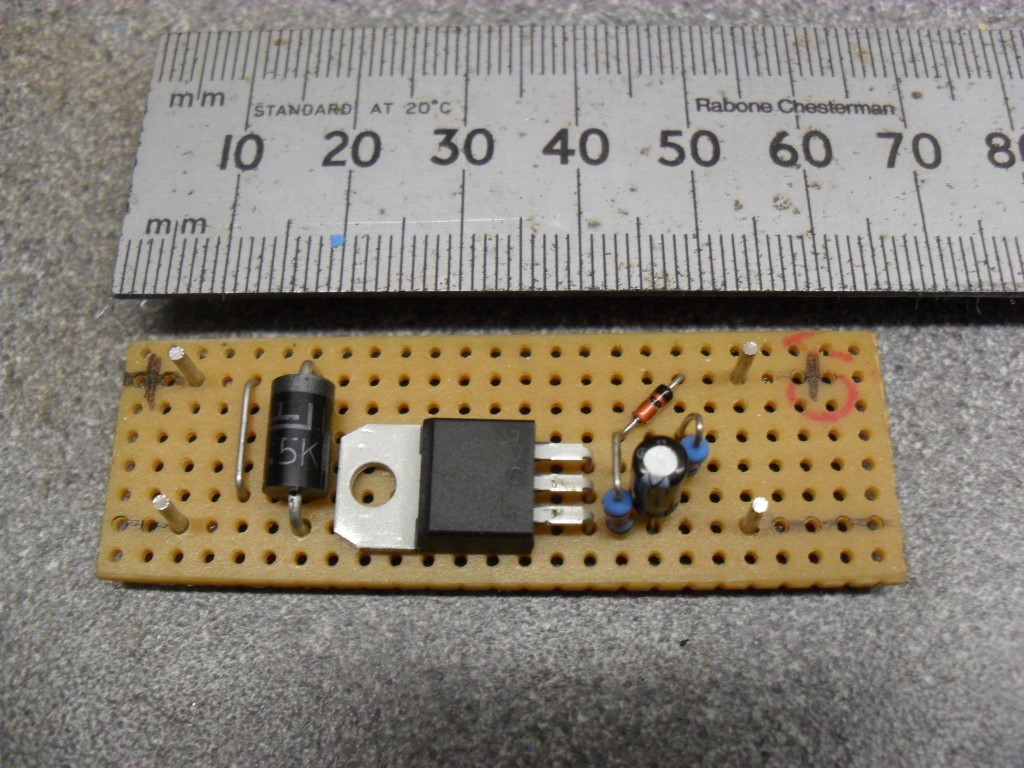
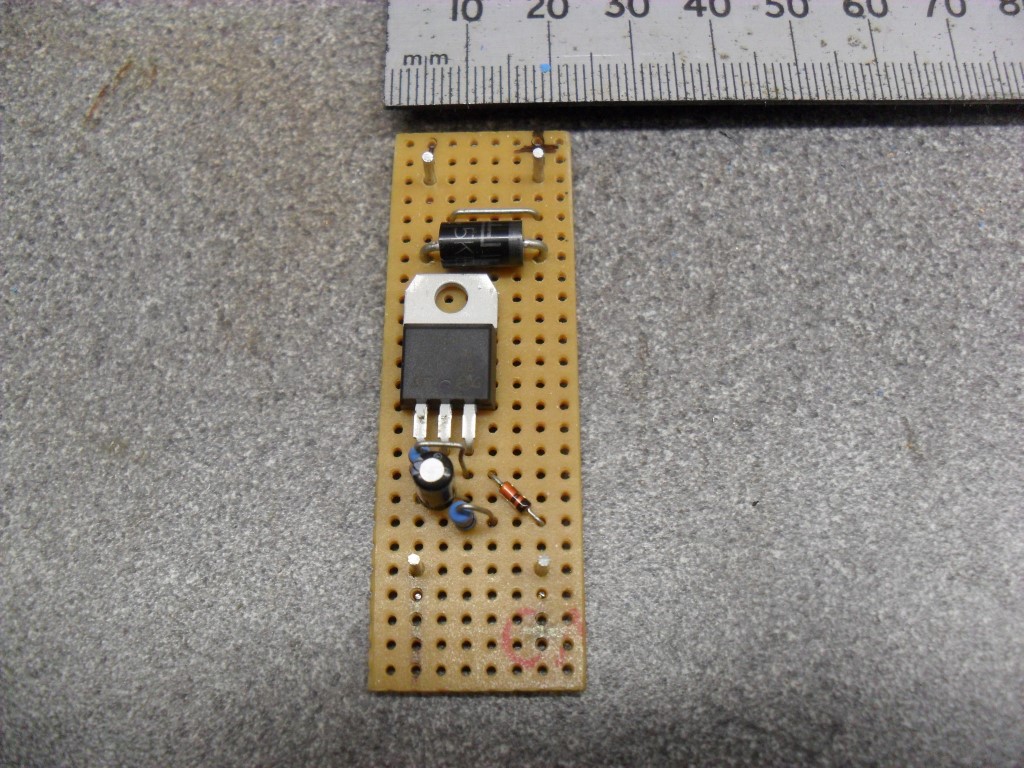
The circuit board could have been made marginally smaller, but I was too lazy to trim it down!
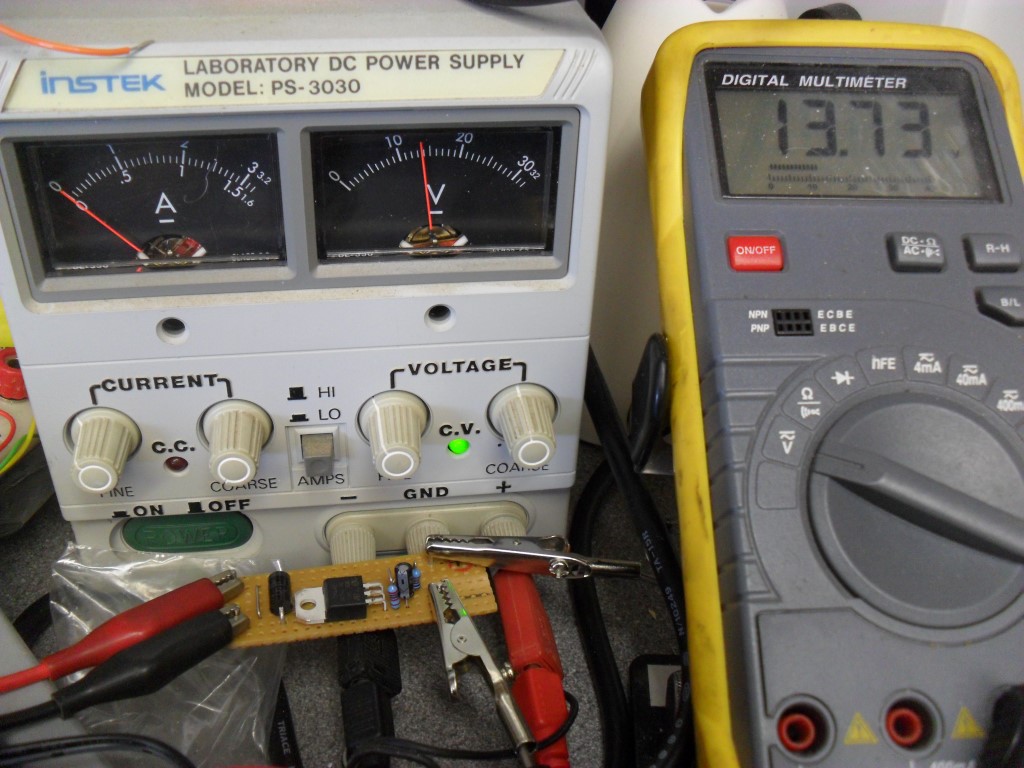
This shows the test setup with the power supply units (PSU) current trip set low in order to monitor the tripping voltage, on the left of the PSU in between the knobs marked CURRENT, their is a small LED with C.C. for Constant Current, the circuit is working passing 13.73v to the meter.
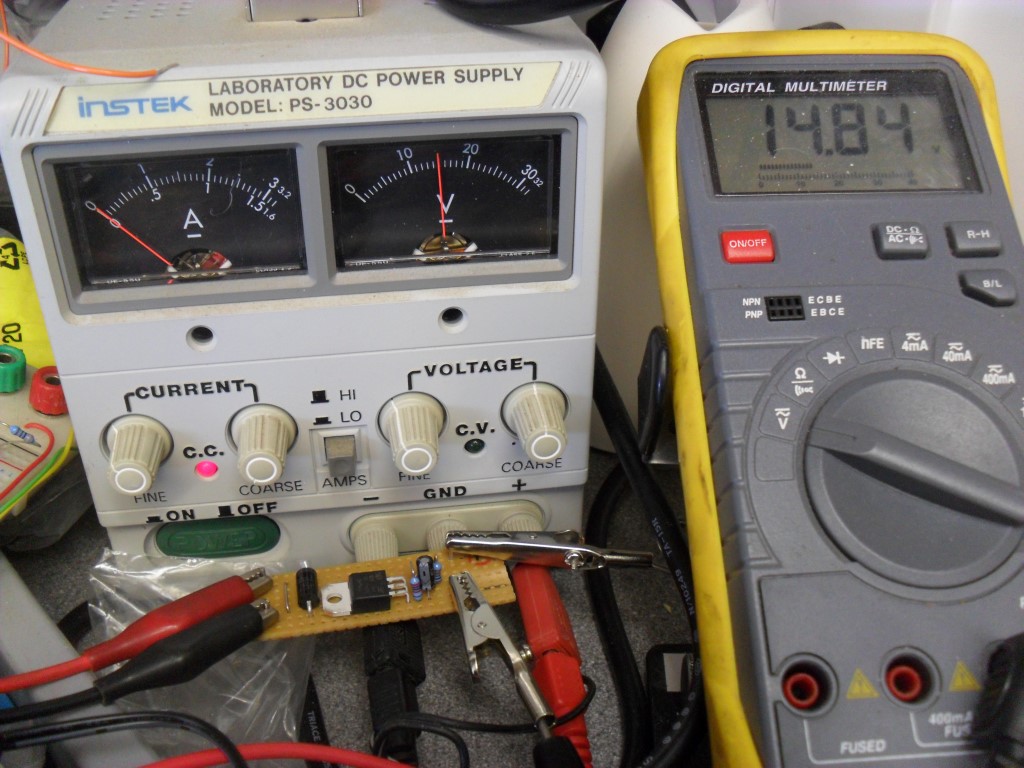
The voltage from the PSU has now been increase past the crowbar limit of 14.8v and the C.C LED is ON showing that if this was a fuse it would have operated to protect the transceiver, 14.8v is the maximum voltage that will ever reach the transceiver, no matter what!
Parts: – These were from UK ebay
1.5KE 15 TVS Diode 1.5KW 15v DO-21 – £1.69
Thyristor 40A, 600v TO-220 TYN640RG – £3.19
IN5245B Diode Zener 15v 0.5w – £1.42
Radial Electrolytic Capacitor 1uF 50v – £0.99
Resistors 27k, 10 Ohm and Veroboard I had already
Less than £8 to protect an expensive radio, filtered speaker etc. pictures of completed unit is HERE.


![20150315_184832[1]](http://www.chatteris.biz/blog/wp-content/uploads/2015/03/20150315_1848321.jpg)
 Loop held by my very able other half.
Loop held by my very able other half.